

Learn how a DC motor works to understand the basic working principle of a DC motor. We consider conventional current, electron flow, the winding, armature, rotor, shaft, stator, brushes, brush arms, terminals, emf, electromagnets, magnetic attraction as well as detailed animations for how the dc motor works.
Scroll to the bottom to watch the YouTube tutorial.
🎁 Get the Fleming’s PDF guide here for FREE ➡️ Here
Parts of a DC Motor
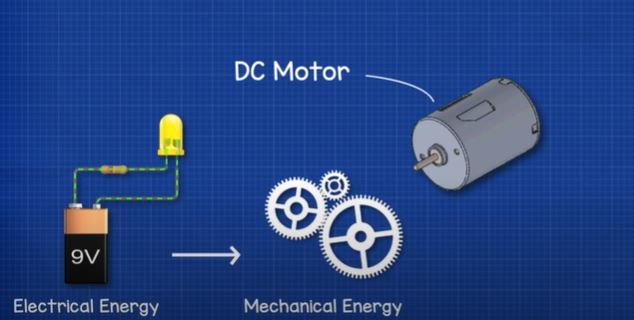
DC motors look something like this above, although there are quite a few variations. These are used to convert electrical energy into mechanical energy and we can use these for example in our power tools, toy cars and cooling fans.
When we look at a DC motor, we first see the metal protective casing which forms the stator.
At one end we have the tip of a shaft protruding through the casing which we can attach gears, fan blades or pulleys onto.
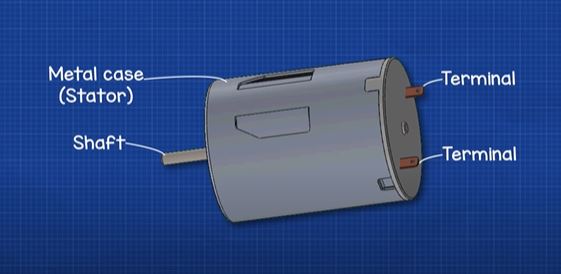
On the other end we have a plastic end cap with two terminals. We can connect a power supply to these terminals to rotate the shaft.
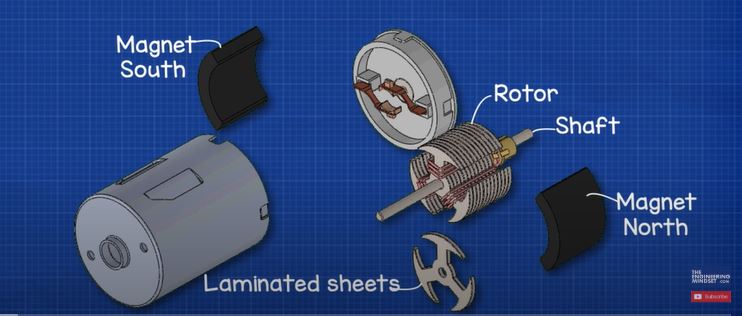
If we remove the casing to look inside the motor, we then find two magnets which form the stator. These are permanent magnets which form a north and south magnetic pole.

Running through the centre of the motor we see this rod which is called the shaft. This is used to transfer mechanical energy. Attached to the shaft we have the rotor. The rotor is made from a number of discs which are laminated together, each disc has these T shaped arms cut into them.
Wrapped around the T shaped arms of the rotor are the coil windings which carry the electrical current from the battery. As the current passes through the coils it produces an electromagnetic field, we control the timing and polarity of this magnetic field to create rotation.
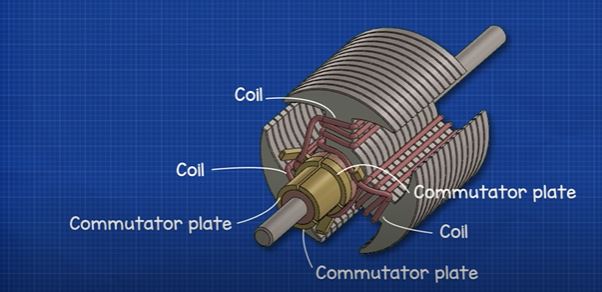
The ends of the coils are connected to the commutator. The commutator is a ring which has been segmented into a number of plates which sit concentrically around the shaft. The plates are separated and electrically isolated from each other as well as the shaft. The ends of each coil connect to different commutator plates, they do this to create a circuit and we’ll see that in detail shortly.
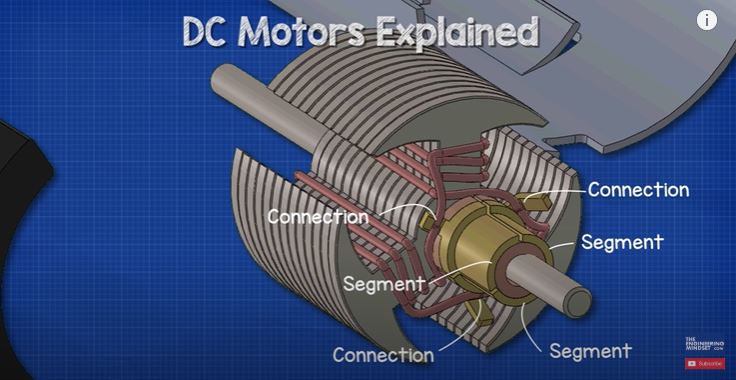
Sitting within the plastic back cover are the brushes, arms and terminals. The commutator plates sit between the two brushes.
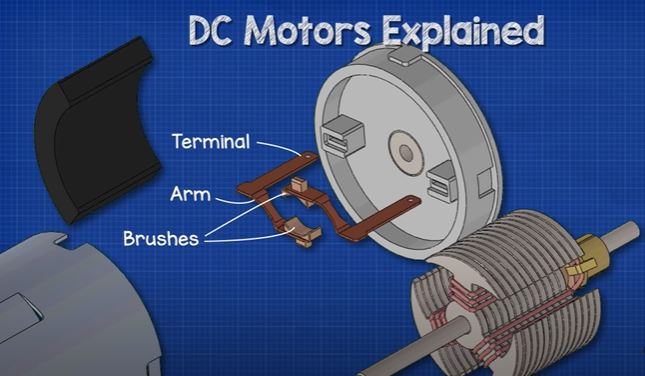
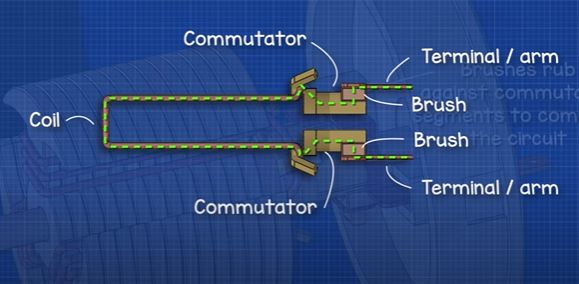
The brushes rub against the commutator segments to complete the circuit. Electricity can then flow through a terminal, through the arm, into the brush, through a commutator segment, into a coil, then out to another commutator segment, into the opposite brush and arm back to the other terminal.
These components give us our basic DC motor. To understand how the DC motor works, we need to understand some fundamentals of electricity as well as how the components inside work.
Electricity Basics
Electricity is the flow of electrons through a wire. When lots of electrons flow in the same direction we call this current. DC electricity means the electrons flow in just a single direction, from one terminal of a battery directly to the other. If we reverse the battery then the current will flow in the opposite direction.

Inside the copper wire we find copper atoms. Orbiting each atom, we find free electrons, these are called free electrons because they are free to move to other atoms. They do naturally move to other atoms by themselves but this is in any and all directions at random, which is of no use to us. We need lots of electrons to flow in the same direction and we can do that by applying a voltage difference across the wire. Voltage is like pressure and will force the electrons to move. Electrons only flow in a complete circuit. They always try to get back to their source, so when we give them a path such as a wire, they will flow through this. Even if we temporarily create a path, they will take it as soon as it’s available. We can place components in this path so that they have to flow through it and do work for us such as illuminating the lamp.

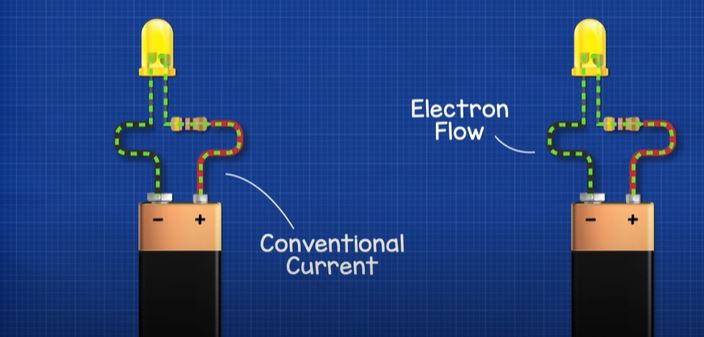
In these animations we’re going to be using two terms. That’s electron flow and conventional current. Electron flow is what’s actually occurring with the electrons flowing from the negative terminal to the positive terminal. Conventional current moves in the opposite direction from positive to negative. Conventional current was the original theory and it’ still widely taught and used today because it’s easier to understand. Just be aware of the two terms and which one we’re using.
Permanent Magnets
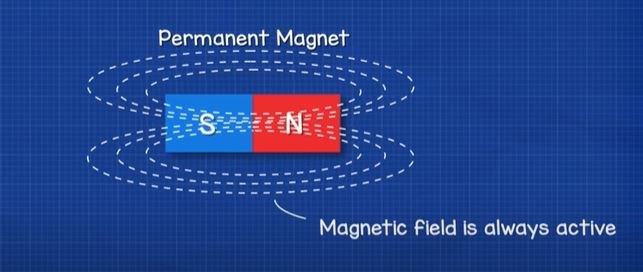
As you probably already know, magnets are polarised with north and south ends. These types are known as permanent magnets, because their magnetic field is always active. When in proximity with another magnet, the alike ends push away and the opposite ends attract. So we get these pushing and pulling forces caused by the magnetic field of the magnets.
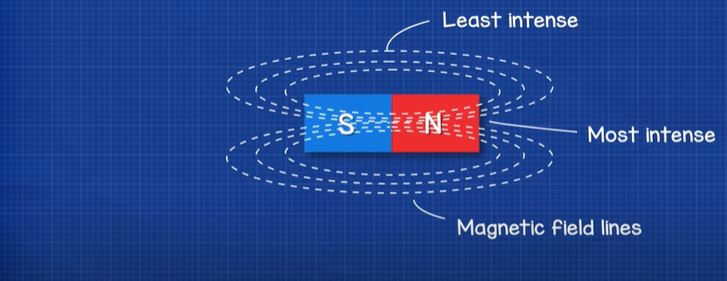
Magnets have these curved magnetic field lines which run from the north pole to the south pole and extend, curving around the exterior. The magnetic field is most powerful at the ends, we see this because there are more magnetic field lines closely packed together.
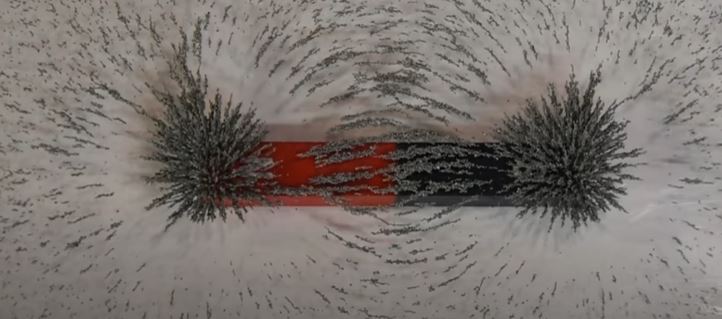
We can actually see the magnetic field of a magnet by sprinkling some iron filings over the magnet.
When two magnets are in close proximity to each other, their magnetic fields interact. Two alike ends will repel each other and their magnetic field lines will not join. However, two opposite polarities will be attracted to each other and the magnetic field lines will converge into a highly concentrated region.
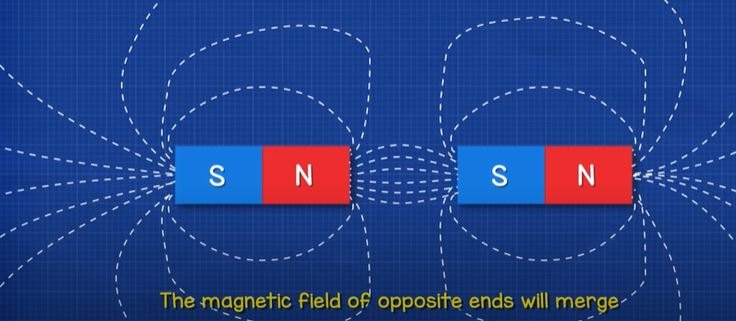
Therefore we place two magnets of opposite polarities into the motor stator to form a strong magnetic field through the rotor.
Electromagnets
When we connect a wire to the positive and negative terminal of a battery, a current of electrons will flow through the wire from the negative to the positive terminal.
When electrons pass through the copper wire, they generate an electromagnetic field around the wire. We can actually see that by placing some magnets around the wire. When we pass electricity through the wire the magnets rotate. When we reverse the current direction, the magnets will also reverse and align the opposite way.
So we can create a magnetic field which acts just like a permanent magnet, except with this type we’re able to turn the magnetic field off.
The problem with the electromagnetic field in a wire is that it’s quite weak. But we can make it much stronger simply by wrapping the wires into a coil. Each wire still creates an electromagnetic field, but they combine into a much larger and stronger magnetic field, that’s what we use to create the coils in the rotor.

Windings
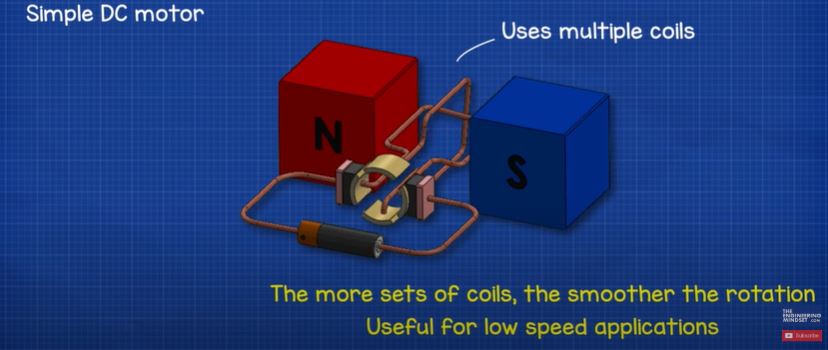
The coils of wire are known as windings. The simplest DC motor has just a single coil. These are a simpler design; the problem though is that they can align magnetically which jams the motor and stops it from rotating. The more sets of coils we have, the smoother the rotation will be, this is especially useful for low speed applications. Therefore we normally find at least three coils in a motor to ensure a smooth rotation.
Each coil is positioned 120 degrees from one another. Between each coil we find a commutator plate. Each coil is connected with two commutator plates. The plates are electrically isolated from each other except that they are connected via the coils. So, if we connect the positive and negative terminals to two of the commutator plates, we can complete the circuit, current will flow and a magnetic field will generate in the coils.
Rotor
The rotor, or armature, is made from multiple discs of iron which are laminated together.
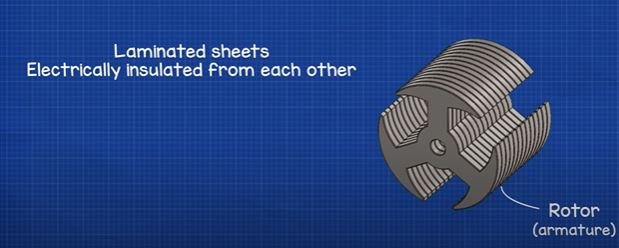
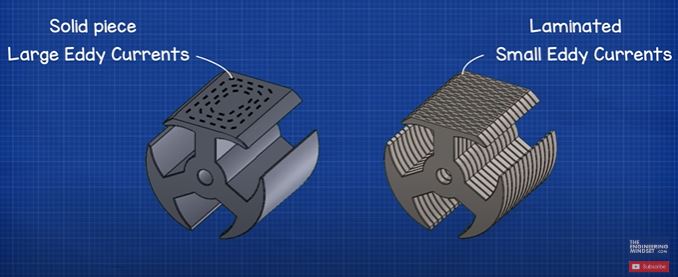
Each disc is electrically insulated from one another with a lacquer coating. If the armature was a solid piece of metal, large eddy currents would swirl around inside. These are caused by induced electromotive force or EMF. These eddy currents affect the efficiency of the motor. To reduce these, engineers segment the rotor into insulated discs, the eddy currents will still flow but they will be much smaller. The thinner the disc the smaller the eddy current will be.
Commutator
The commutator consists of small copper plates which are mounted to the shaft. Each plate is electrically isolated from one another as well as the shaft. The end of each coil is connected to a different commutator plate. In this design each commutator plate is connected with 2 coils.
The plates deliver electricity to the coils. To get the electricity from the battery and into the plates, we have some brushes which rub against the plates. The brush arms hold these in place. When we complete the circuit, electricity will flow into the commutator segments via the brushes and then flow into 1 or 2 coils as a path becomes available.

At certain points in the rotation, the brushes will come into contact with two plates. This will create an arc and we get small bursts of blue light as this occurs. The arcs are friction will destroy the brush over time.
Flemings left hand rule
Something we must understand is Flemings left hand rule and for this we need to use our left hand in this funny shape. You need to remember that Flemings rule uses CONVENTIONAL CURRENT not electron flow. Conventional current is from positive to negative.
We use Flemings left hand rule to work out which direction the coil will push and pull, as the electromagnetic field interacts with the magnetic field of the permanent magnet.
If we look at a wire and visualise which end is connected to positive or negative, we can work out the direction of force.
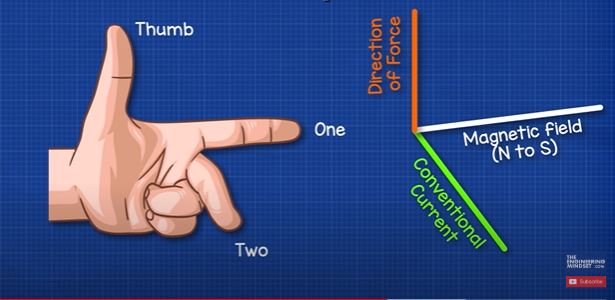
To do that, stick your left hand out flat, and think of these as being your thumb, then fingers 1, 2, 3 and 4. Close fingers 4 and 3. Point finger 2 to the right, point finger 1 straight ahead and point your thumb upwards.
Your 2nd finger points in the direction of conventional current from positive to negative. The 1st finger points at the magnetic field of the permanent magnet from north to south. Your thumb will point in the direction of movement.
We’ve made a PDF guide which includes some examples to help you remember this.
🎁 Get the Fleming’s PDF guide here for FREE ➡️ Here
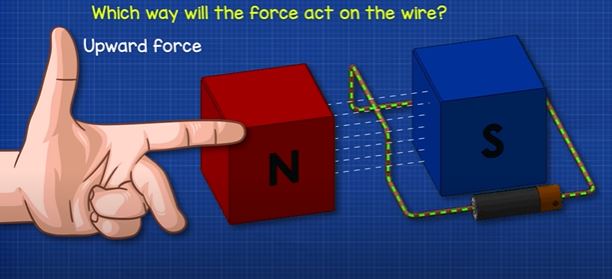
So if we look at this example, the conventional current is coming towards us and the magnetic field is going left to right. So we point our 2nd finger towards us and the 1st finger in the direction of the magnetic field. Our thumb is therefore pointing upwards which means the force on the wire will move it upwards.
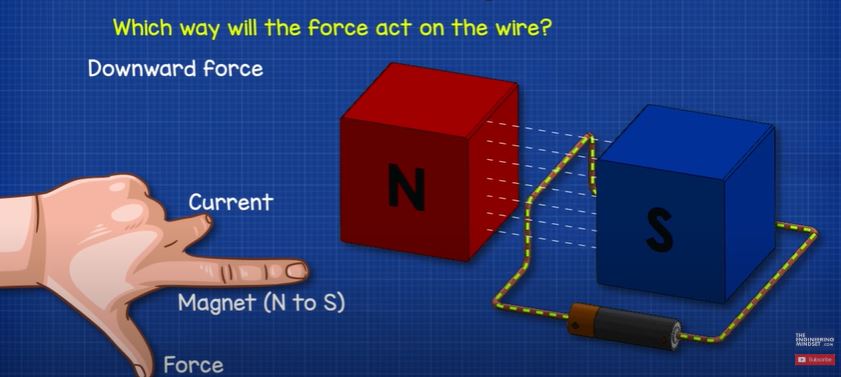
In this example we have the conventional current reversed in the wire so it’s moving away from us. Therefore, we flip our hand over so our 2nd finger is pointing away from us. Our first finger still points in the direction of the magnetic field and our thumb points down. This means the force on the wire will move it downwards.
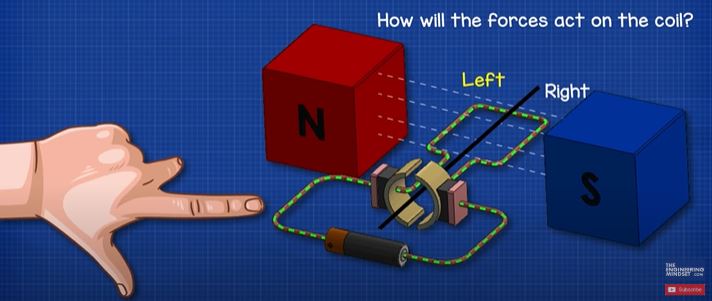
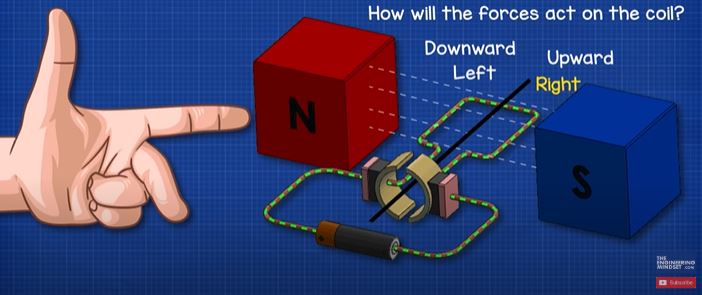
If we wrap the wire into a coil, how will the forces act now? Well we need to consider the coil as two halves. On the left half the conventional current is flowing away from us, so our hand flips and we see we get a downward force. On the right-hand side, the conventional current is flowing towards us so the force is upwards. Therefore, we have a combined upwards and downwards force so the coil will rotate. So now we see how the motor rotates, lets have a look in detail.
Operation
Ok lets consider the operation of a dc motor in slow motion. We’ll just point out the main parts, there’s the north and south magnets which concentrate a magnetic field through the centre. In the centre we find the shaft, attached to the shaft we have the rotor, wrapped around the rotor we have the coils, connecting the coils we have the commutator and providing power to the commutator we have the brushes and brush arms. Then we have a power supply.
The rotor, coils and commutator are going to rotate, everything else will remain stationary.
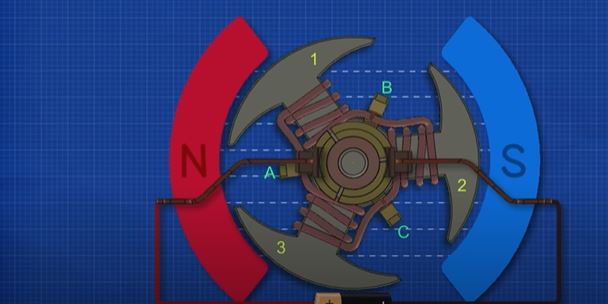
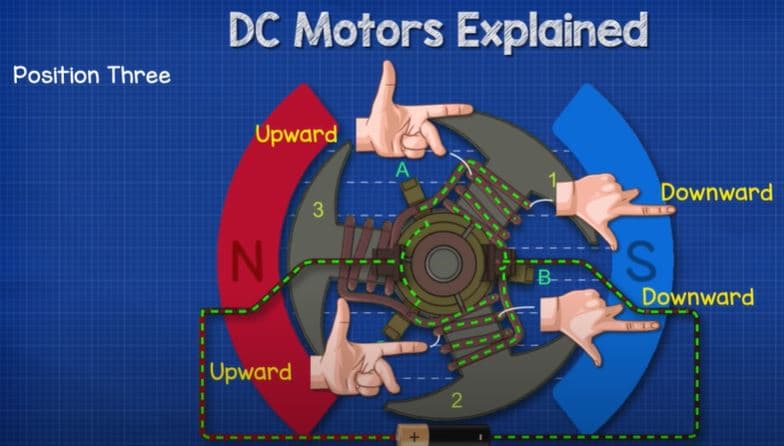
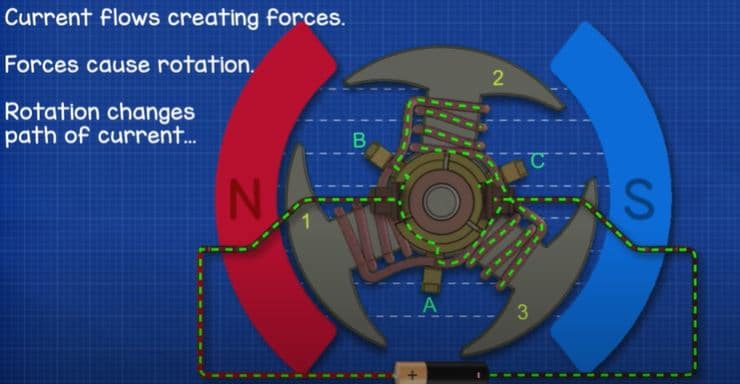
We’re going to be considering the flow of conventional current and the forces which are occurring in the long sides of each coil. We’ll also label these coils 1,2 and 3. And the commutator plates a, b and c.
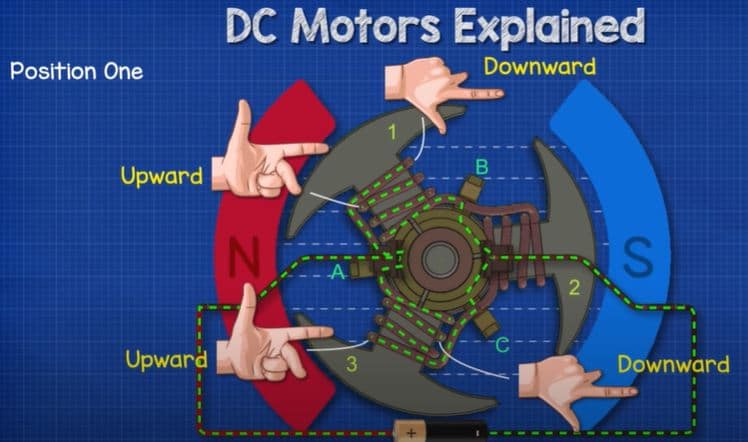
- In this first position the conventional current will flow from the positive of the battery, into plate A, then through both coils 1 & 3, through plates B & C into the right brush and back to the battery. The right side of coil 1 has a downward force and the left side has an upward force. Coil 3 has an upward force on this side and a downward force on this side. And So it rotates.
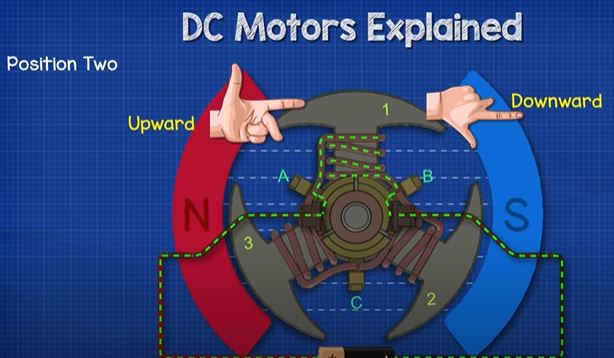
2. The current now flows through plate A into coil 1 only, then exits via plat B. this creates an upward force on the left and a downward force on the right.
3. The current now flows through plates A and C through coils 1 and 2 into plate B. coil 1 has an upward force on the left and a downward on the right. Coil 2 has an upward force on the left and a downward on the right.

4. The current now flows through plate c, into coil 2 and into plate b. the left side of coil 2 has an upward force and the right has a downward force.
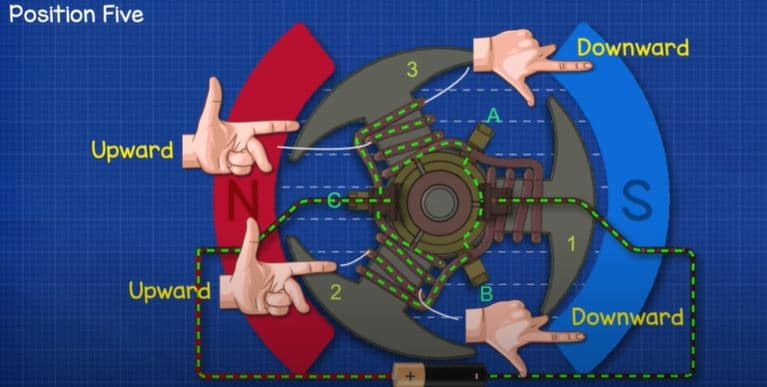
5. The current now flows through plate c into coils 3 and 2 and exits via plates a and b. this gives us our upward and downward forces on the coils.
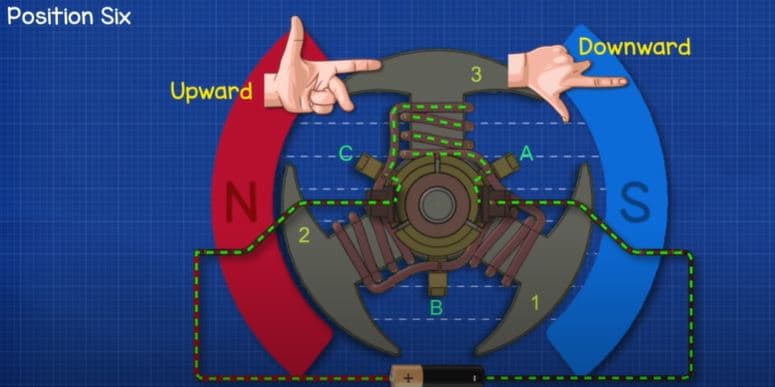
6. The current now flows through plate c, into coil 3 then out through plate a, creating our upward and downward forces.
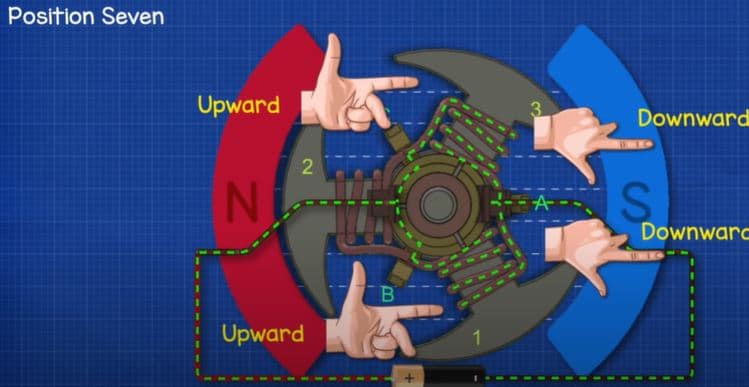
7. The current now flows through plates c and B, through coils 3 and 1 and out through plate a, giving us our forces on each side.
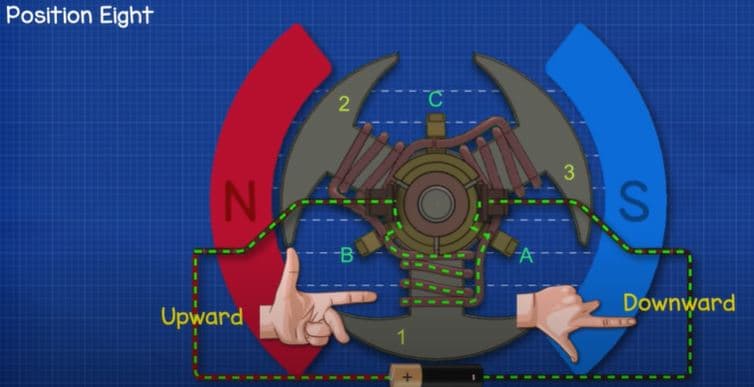
8. The current now flows through plate b, into coil 1 and out through plate a which creates our forces.
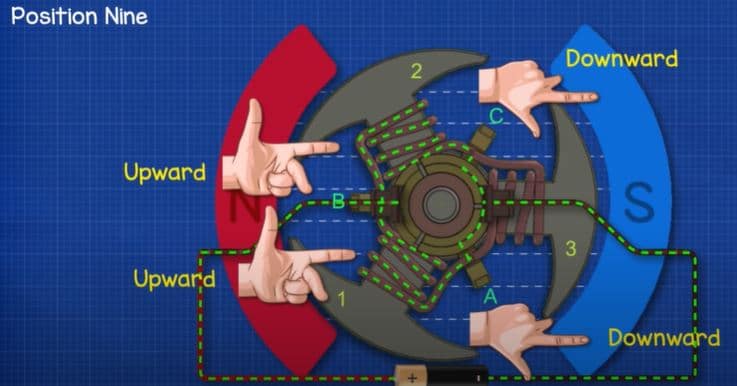
9. The current now flows through plate b into coils 2 and 1, then exits via plates c and a.
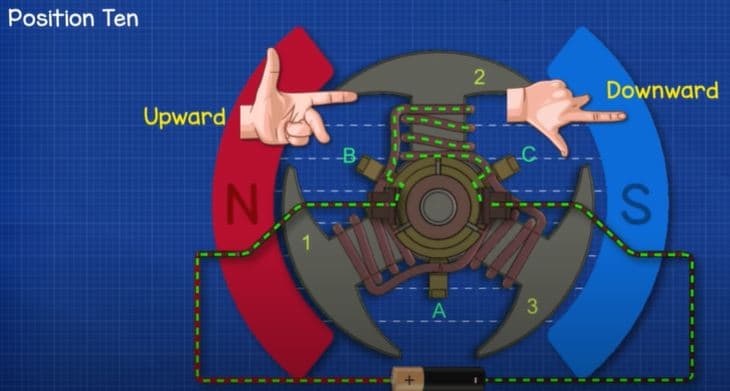
10. The current now flows through plate b into coil 2 then out through plate c.
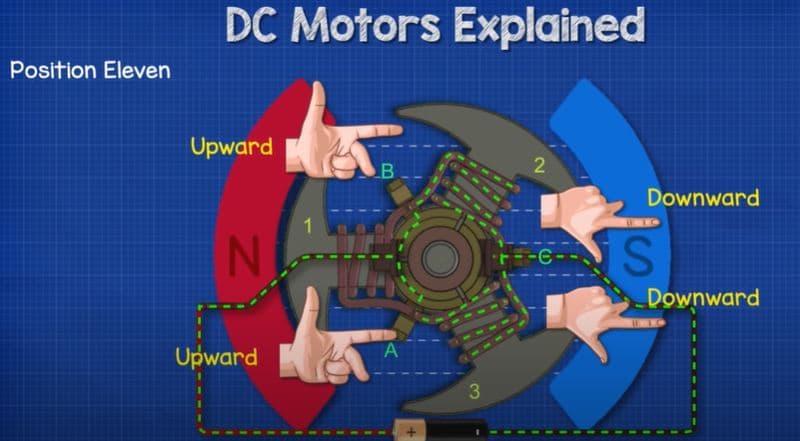
11. The current now flows through plates B and A into coils 2 and 3 then out through plate c.
This then repeats again and again like so, which gives us our rotating force which we use to drive fans, gears, wheels and pulleys.
If we reverse the power supply, we reverse the current and that will reverse the forces and thus the direction of rotation so that’s how we use magnetic forces and electricity to create a simple motor.
















")

")

{kind=link}
How many wrapping coil in one side and what kind of brush and how to make brush. Please explain me.
I need to convert a 1950s AC motor to PM DC motor. I got it to run but not start. Where can I find magnet placement guidance to achieve start and power??? Dennis
What happens if you reassemble the motor with both magnets having North pointed in the same direction (north and north) ?
Please a new Flemings PDF download link , always get “no database select” . Thanks so much for the great videos.